PRACA ORYGINALNA
Zastosowanie obserwatora stanu w badaniach dynamiki modeli pojazdów
1
Politechnika Poznańska
Data publikacji: 01-04-2004
Rail Vehicles/Pojazdy Szynowe 2004,2,38-43

STRESZCZENIE
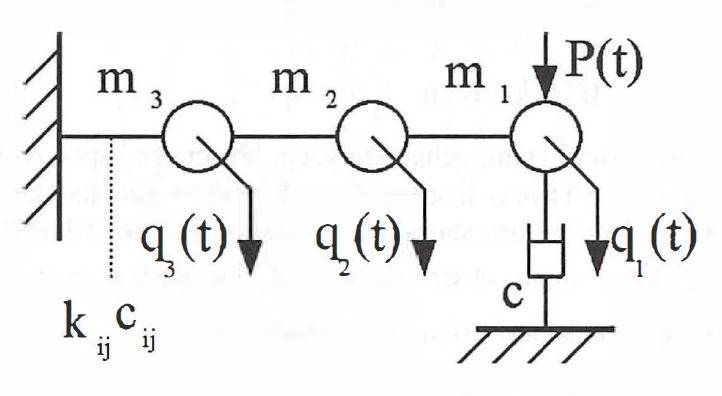
W artykule przeprowadzono syntezę macierzy stanu liniowego obserwatora stanu dla modeli konstrukcji typowych dla pojazdów przy znanych wymuszeniach oraz podano przykłady obliczeń.
REFERENCJE (12)
1.
Barczak A., Zastosowanie modalnych kryteriów sterowalności i obserwowalności w tworzeniu modelu dynamiki pojazdu, Pojazdy Szynowe, 4/2003.
2.
Barczak A., Zastosowanie miar obserwowalności układu do oceny wyboru wektora wielkości mierzonych w modelu pojazdu, Zeszyty Naukowe Politechniki Pozna,iskiej, Maszyny Robocze i Transport, Nr 57, 2004.
3.
Best M. C., Gordon T. J., Dixon P. J., An Extended Adaptive Kalman Filter for Real-time State Estimation of Vehicle Handling Dynamics, VSD 2000, Vol. 34.
4.
Frank P. M., Diagnoseverfahren in der Automatisierungstechnik, Automatisierungstechnik 42 (1994) 2.
5.
Golub G. H., Van Loan Ch. F., Matrix Computations, The Johns Hopkins University Press, 1996.
6.
lsermann R., Diagnosis Methods for Electronic Controlled Vehicles, VSD 2001, Vol. 36, No. 2-3.
8.
Sojjker D., Bajkowski J., Miiller P. C., Detection of Cracks in Turborotors - A New Observer Based Method, ASME, J. Dyn. Syst., Meas., Control, Vol. 115, September 1993.
9.
Yi K., Hedrick K., Lee S.-C., Estimation of Ti re-Road Friction Using Observer Based ldentifiers, VSD 1999, Vol. 31.
10.
Yi K., Shin B.-K., Lee K.-I., Estimation of Turbine Torque of Automafie Transmission Using Nonlinear Observers, ASME, J. Dyn. Syst., Meas., Control, Vol. 122, June 2000.
11.
Yi K., Song B. S., Observer Design for Semi-Active Suspension Control, VSD 1999, Vol. 32.
Udostępnij
| eISSN: | 2719-9630 |
| ISSN: | 0138-0370 |
Przetwarzamy dane osobowe zbierane podczas odwiedzania serwisu. Realizacja funkcji pozyskiwania informacji o użytkownikach i ich zachowaniu odbywa się poprzez dobrowolnie wprowadzone w formularzach informacje oraz zapisywanie w urządzeniach końcowych plików cookies (tzw. ciasteczka). Dane, w tym pliki cookies, wykorzystywane są w celu realizacji usług, zapewnienia wygodnego korzystania ze strony oraz w celu monitorowania ruchu zgodnie z Polityką prywatności. Dane są także zbierane i przetwarzane przez narzędzie Google Analytics (więcej).
Możesz zmienić ustawienia cookies w swojej przeglądarce. Ograniczenie stosowania plików cookies w konfiguracji przeglądarki może wpłynąć na niektóre funkcjonalności dostępne na stronie.
Możesz zmienić ustawienia cookies w swojej przeglądarce. Ograniczenie stosowania plików cookies w konfiguracji przeglądarki może wpłynąć na niektóre funkcjonalności dostępne na stronie.