Układ przeciwpoślizgowy przy hamowaniu dla
szynowych pojazdów trakcyjnych
1
Instytut Pojazdów Szynowych „TABOR”
Data publikacji: 02-05-2011
Rail Vehicles/Pojazdy Szynowe 2011,2,30-33

STRESZCZENIE
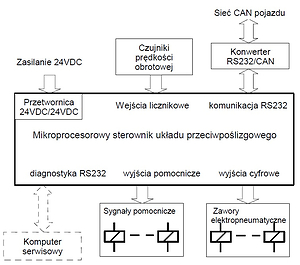
W artykule przedstawiono budowę i zasadę działania układu przeciwpoślizgowego
wykorzystującego sterownik 88ZE-01 opracowany w Instytucie Pojazdów Szynowych
„TABOR”. Przedstawiono budowę sterownika oraz jego opis funkcjonalny.
Zaprezentowano wyniki działania sterownika. Przedstawiono propozycję dalszych
prac nad układem przeciwpoślizgowym. Artykuł powstał w ramach projektu celowego
„Mikroprocesorowy system przeciwpoślizgowy dla trakcyjnych pojazdów
szynowych spełniający wymagania unijnych Technicznych Specyfikacji Interoperacyjności”
N R10 0046 06/2009 finansowanego przez Ministerstwo Nauki i Szkolnictwa
Wyższego
REFERENCJE (6)
1.
B a r n a G., Układ sterowania rozmytego do likwidacji poślizgu przy hamowaniu, Pojazdy Szynowe nr 3/2002.
2.
B a r n a G., K a l u b a M., Matematyczny model pojazdu szynowego i jego zastosowanie do symulacji działania układu przeciwpoślizgowego, Pojazdy Szynowe nr 1/2003.
3.
B a r n a G., S t y p k a M., Mikroprocesorowy układ wykrywania i likwidacji poślizgu przy hamowaniu, X Jubileuszowa Ogólnopolska Konferencja Naukowa Trakcji Elektrycznej SEMTRAK 2002, Zakopane 2002.
4.
B a r n a G., S t y p k a M., Układ wykrywania i likwidacji poślizgu dla zmodernizowanej lokomotywy spalinowej ST44, Materiały Konferencyjne XVII Konferencja Naukowa ,,Pojazdy Szynowe 2006”, Kazimierz Dolny 2006.
5.
B o i t e u x M., Le problème de l’adhérence en freinage, Revue Générale des Chemins de Fer, nr 105, 1986.
6.
Ha b a M., Programy wspomagające uruchamianie mikroprocesorowych systemów sterowania w pojazdach szynowych, Pojazdy Szynowe, 2/2007.
Udostępnij
| eISSN: | 2719-9630 |
| ISSN: | 0138-0370 |
Przetwarzamy dane osobowe zbierane podczas odwiedzania serwisu. Realizacja funkcji pozyskiwania informacji o użytkownikach i ich zachowaniu odbywa się poprzez dobrowolnie wprowadzone w formularzach informacje oraz zapisywanie w urządzeniach końcowych plików cookies (tzw. ciasteczka). Dane, w tym pliki cookies, wykorzystywane są w celu realizacji usług, zapewnienia wygodnego korzystania ze strony oraz w celu monitorowania ruchu zgodnie z Polityką prywatności. Dane są także zbierane i przetwarzane przez narzędzie Google Analytics (więcej).
Możesz zmienić ustawienia cookies w swojej przeglądarce. Ograniczenie stosowania plików cookies w konfiguracji przeglądarki może wpłynąć na niektóre funkcjonalności dostępne na stronie.
Możesz zmienić ustawienia cookies w swojej przeglądarce. Ograniczenie stosowania plików cookies w konfiguracji przeglądarki może wpłynąć na niektóre funkcjonalności dostępne na stronie.