Przyszłościowe współbieżne mikroprocesorowe inteligentne systemy
mechatroniczne w sterowaniu i diagnostyce pojazdów szynowych (1)
1
Instytut Pojazdów Szynowych „TABOR”
Data publikacji: 02-10-2007
Rail Vehicles/Pojazdy Szynowe 2007,4,26-30

STRESZCZENIE
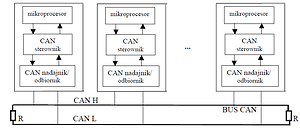
W artykule przedstawiono przyszłościowe rozproszone współbieżne mikroprocesorowe
inteligentne systemy mechatroniczne w sterowaniu i diagnostyce pojazdów szynowych. Systemy
te będą podstawą do tworzenia różnych modeli i układów informatycznych i informacyjnych dla
pojazdów szynowych. Artykuł składa się z kilku części. Pierwsza część artykułu (1) obejmuje
ogólne wiadomości na temat problemów rozproszonych układów sterowania oraz stosowanych
modeli sieci CAN. Zawiera informacje na temat stosowanych systemów sterowania przez firmy
europejskie.
Artykuł powstał w wyniku realizacji projektu badawczego KBN 4T 12C 04929 pt. „Rozproszone
współbieżne mikroprocesorowe inteligentne podsystemy mechatroniczne w sterowaniu i diagnostyce
pojazdów szynowych”.
REFERENCJE (10)
1.
Durzyński Z.: Sterowanie i diagnozowanie nowoczesnych pojazdów szynowych. Zeszyty naukowe Politechniki Poznańskiej, Maszyny Robocze i Pojazdy Nr.42,1995.
2.
Grega W.: Metody i algorytmy sterowania cyfrowego w układach scentralizowanych i rozproszonych. Wydawnictwo AGH ,2004.
4.
Opracowanie nr OR–9066 „Przegląd najnowszych systemów sterowania i diagnozowania pojazdów szynowych”, Poznań ,czerwiec 2006. Praca niepublikowana. Archiwum IPS „TABOR”.
5.
International Standards Organization, Basic Reference Model for Open Systems Interconnection, ISO 7498,1983.
6.
CAN Specification 2.0, Part A. CAN in Automation, Am Weichselgarten 26, D-91058 Erlangen, 1999, www.can-cia.org.
7.
CAN Specification 2.0, Part B. CAN in Automation, Am Weichselgarten 26, D-91058 Erlangen, 1999, www.can-cia.org.
8.
CAN Implementation. CAN in Automation, Am Weichselgarten 26, D-91058 Erlangen, 2000, www.can-cia.org.
9.
ISO 11898, Road vehicles – Controller area network (CAN) – Part 1: Data link layer and physical signalling, 1999.
10.
ISO 11898, Road vehicles – Controller area network (CAN) – Part 2: High-speed medium access unit, 1999.
Udostępnij
| eISSN: | 2719-9630 |
| ISSN: | 0138-0370 |
Przetwarzamy dane osobowe zbierane podczas odwiedzania serwisu. Realizacja funkcji pozyskiwania informacji o użytkownikach i ich zachowaniu odbywa się poprzez dobrowolnie wprowadzone w formularzach informacje oraz zapisywanie w urządzeniach końcowych plików cookies (tzw. ciasteczka). Dane, w tym pliki cookies, wykorzystywane są w celu realizacji usług, zapewnienia wygodnego korzystania ze strony oraz w celu monitorowania ruchu zgodnie z Polityką prywatności. Dane są także zbierane i przetwarzane przez narzędzie Google Analytics (więcej).
Możesz zmienić ustawienia cookies w swojej przeglądarce. Ograniczenie stosowania plików cookies w konfiguracji przeglądarki może wpłynąć na niektóre funkcjonalności dostępne na stronie.
Możesz zmienić ustawienia cookies w swojej przeglądarce. Ograniczenie stosowania plików cookies w konfiguracji przeglądarki może wpłynąć na niektóre funkcjonalności dostępne na stronie.